4.2.2 teaching positions
Before writing a program to control your meArm you have to teach him some positions.
To do this you just have to run the teaching.av program already present in the "sd" folder of the github repository.
This program (written using AVIL!) will allow you to manually move the robot and to "record" some positions.
A short text will explain you how to manually move the arm:
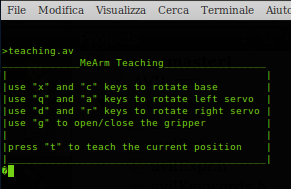
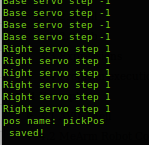
All you have to do now is to manually move the robot using the keyboard in the desired position and then teach it pressing the "t" key.
A prompt will appear to let you insert the position name that will be saved in the "posdb" file (automatically created) when you'll press Enter.
Continue to add as many position as you need to your application...you can later use them in your first program!