4.2.3 pick&place example
This is the typical "basic" application for an industrial robot.
The task the robot will have to perform is very simple but contains all the elements of a "real world" application (movements and I/O interaction with the world).
- wait for an "external" digital input to start the cycle (in my case just a button).
- pick a part in a given "pick" position.
- place the part in the "palce" position.
- return in the "home" position.
- turn on a digital output to communicat the world the cycle is terminated (in my case just a led).
All this operations are executed in an infinite loop, as it usually happen for industrial robots.
You can see in this video the example running on my desk!
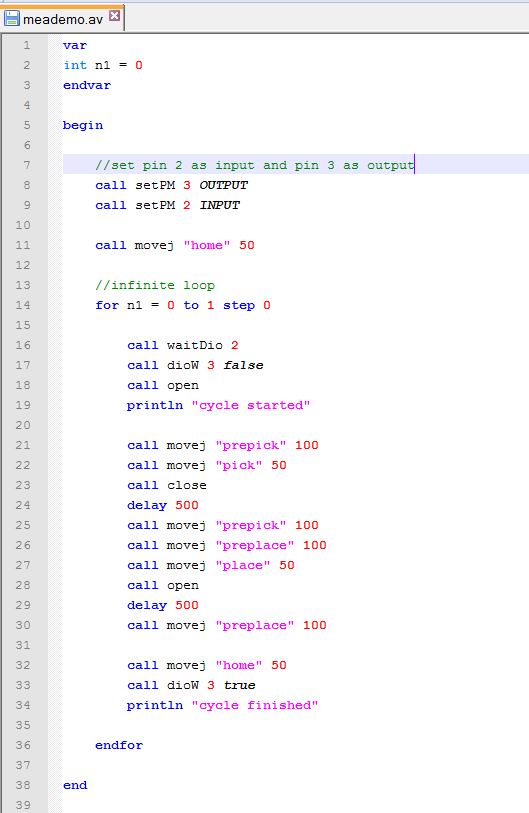
This example (./meademo.av ) is available as AVIL program in the sd folder of the github repository.
As you can see in the code below I used 5 positions to made this example:
- a starting position called "home".
- an "approach" to the pick position called "prepick".
- a pick position called "pick".
- an "approach" to the place position called "preplace".
- a place position called "place".
Of course, you need to create this positions of you want to run this example.
If you don't know how to teach a position you probably didn't read this.